Simple 2 and 3-axis applications can mostly be handled with a Cartesian System, but more complex three-dimensional parts are more suited to robot application.
The dispense head can be mounted on the robot arm, or the dispense head can be in a fixed position with the robot moving the part.
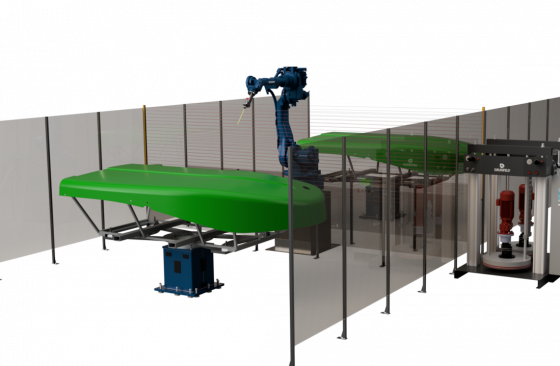
The reach of a robot can be increased by, mounting it on a moving gantry, or combining it with a Turn Table or Trunnion.
Often with dispense applications it is beneficial the keep the fluid delivery hose lengths to a minimum, which is when a Robot and Turn Table combination can be really beneficial.
Robot payload and reach (or combined system reach) are specified to suit each application.
When it comes to Robotic application – synchronization between the dispense output and the travel of the robot is critical to maintaining a consistent bead profile.
Showing the single result